Este ejemplo muestra cómo leer un telémetro ultrasónico
Devantech SRFxx,
que se comunica a través del
protocolo
serie síncrono de I2C,
usando la biblioteca Wire de Arduino.
El protocolo I2C implica el uso de dos líneas para enviar y recibir
datos:
-
un pin de reloj serie (SCL) envía los impulsos de la placa Arduino o Genuino Maestro a intervalos regulares,
-
un pin de datos serie (SDA) sobre el cual se envían los datos entre los dos dispositivos.
A medida que cambian las líneas de reloj de LOW a HIGH (conocido como el
flanco de subida del pulso de reloj), un único bit de información - que
va a formar de la secuencia de la dirección de un dispositivo específico
y mando de datos - se transfiere desde la placa para el dispositivoI2C a
través de la línea SDA. Cuando se envía esta información - bit a bit -,
la llamada del dispositivo ejecuta la solicitud y transmite datos de
nuevo es - si es necesario - a la placa sobre la misma línea utilizando
la señal de reloj que sigue siendo generada por el Maestro en SCL como
la sincronización.
Debido a que el protocolo I2C permite a cada dispositivo habilitado a
tener su propia dirección única, y como los dispositivos maestro y
esclavo hacen turnos para comunicarse a través de una sola línea, es
posible que la placa Arduino o Genuino se comunique (a su vez) con
muchos dispositivos , u otras plataformas, utilizando sólo dos pines del
microcontrolador.
Hardware necesario
-
Arduino o Genuino
-
Devantech SRFxx Range Finder (modelos SRF02 o SRF10 haga clic para ver)
-
Condensador de 100 uf
-
Cable para interconexion
-
Protoboard
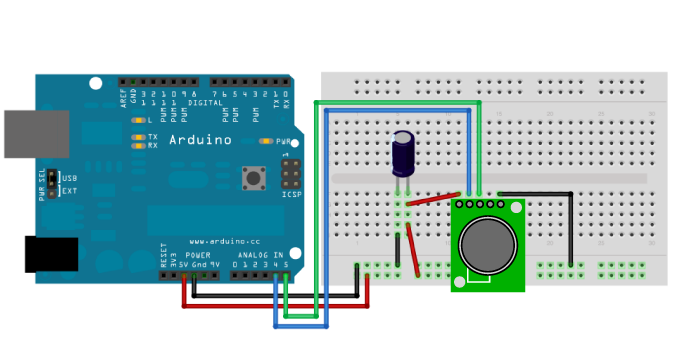
Circuito
Una el pin SDA de su SRFxx al
pin analógico 4 de su placa Arduino, y el pin SCL al pin analógico 5.
Alimente su SRFxx de
5V, añadiendo un condensador de 100 uF en paralelo con el telémetro
para alisar es la fuente de alimentación.

{kind=link}
Esquema

Código
// I2C SRF10 or SRF08 Devantech Ultrasonic Ranger Finder
// por Nicholas Zambetti <http://www.zambetti.com>
// y James Tichenor <http://www.jamestichenor.net>
// Demuestra el uso de la biblioteca Wire library leyendo datos de
// Demuestra el uso de la biblioteca Wire library leyendo datos de
// un sensor Devantech Utrasonic Rangers SFR08 ySFR10
// Creaso 29 Abril de 2006
// Este codigo es de dominio público
// Creaso 29 Abril de 2006
// Este codigo es de dominio público
#include <Wire.h>
void setup() {
Wire.begin(); // se conecta al bus i2c (direccion para el Maestro opcional)
Serial.begin(9600); // inicia la comunicacion Seria a 9600bps
}
int reading = 0;
void loop() {
// Paso 1: instruir sensor para leer los ecos
Wire.beginTransmission(112); // transmite al dispositivo numero 112 (0x70)
// la direccion especificada en la Hoja de Datos es 224 (0xE0)
// pero el direccionamiento i2c los 7 bits más altos de 112
Wire.write(byte(0x00)); // conjuntos de registros puntero al registro de comandos (0x00)
Wire.write(byte(0x50)); // instruye al sensor para medir en "pulgadas" (0x50)
// use 0x51 para centimetros
// use 0x52 para microsegundos
Wire.endTransmission(); // parada de transmision
// Paso 2: espera a que sucedan las lecturas
delay(70); // la Hoja de Datos sugiere al menos 65 milisegundos
// Paso 3: instruye sensor para devolver un eco particular, la lectura
Wire.beginTransmission(112); // se transmite al dispositivo numero 112
Wire.write(byte(0x02)); // conjuntos de registros puntero a registro eco # 1 (0x02)
Wire.endTransmission(); // parada de transmision
// Paso 4: solicita la lectura del sensor
Wire.requestFrom(112, 2); //solicita 2 bytes desde el dispositivo esclavo numero 112
// Paso 5:recibe la lectura del sensor
if (2 <= Wire.available()) { //si se han recibido 2 bytes
reading = Wire.read(); // recibe byte alto (sobrescribe la lectura previa)
reading = reading << 8; // cambiar byte alto para ser los 8 bits más altos
reading |= Wire.read(); // recibe el byte bajo como los 8 bits mas bajos
Serial.println(reading); //imprime la lectura
}
delay(250); // esperar un poco para poder leer la salida :)
}
/*
// El codigo siguiente camabia la direccion de un Devantech Ultrasonic Range Finder (SRF10 o SRF08)
// Uso: Cambio de dirección (0x70, 0xE6);
void changeAddress(byte oldAddress, byte newAddress)
{
Wire.beginTransmission(oldAddress);
Wire.write(byte(0x00));
Wire.write(byte(0xA0));
Wire.endTransmission();
Wire.beginTransmission(oldAddress);
Wire.write(byte(0x00));
Wire.write(byte(0xAA));
Wire.endTransmission();
Wire.beginTransmission(oldAddress);
Wire.write(byte(0x00));
Wire.write(byte(0xA5));
Wire.endTransmission();
Wire.beginTransmission(oldAddress);
Wire.write(byte(0x00));
Wire.write(newAddress);
Wire.endTransmission();
}
*/
void setup() {
Wire.begin(); // se conecta al bus i2c (direccion para el Maestro opcional)
Serial.begin(9600); // inicia la comunicacion Seria a 9600bps
}
int reading = 0;
void loop() {
// Paso 1: instruir sensor para leer los ecos
Wire.beginTransmission(112); // transmite al dispositivo numero 112 (0x70)
// la direccion especificada en la Hoja de Datos es 224 (0xE0)
// pero el direccionamiento i2c los 7 bits más altos de 112
Wire.write(byte(0x00)); // conjuntos de registros puntero al registro de comandos (0x00)
Wire.write(byte(0x50)); // instruye al sensor para medir en "pulgadas" (0x50)
// use 0x51 para centimetros
// use 0x52 para microsegundos
Wire.endTransmission(); // parada de transmision
// Paso 2: espera a que sucedan las lecturas
delay(70); // la Hoja de Datos sugiere al menos 65 milisegundos
// Paso 3: instruye sensor para devolver un eco particular, la lectura
Wire.beginTransmission(112); // se transmite al dispositivo numero 112
Wire.write(byte(0x02)); // conjuntos de registros puntero a registro eco # 1 (0x02)
Wire.endTransmission(); // parada de transmision
// Paso 4: solicita la lectura del sensor
Wire.requestFrom(112, 2); //solicita 2 bytes desde el dispositivo esclavo numero 112
// Paso 5:recibe la lectura del sensor
if (2 <= Wire.available()) { //si se han recibido 2 bytes
reading = Wire.read(); // recibe byte alto (sobrescribe la lectura previa)
reading = reading << 8; // cambiar byte alto para ser los 8 bits más altos
reading |= Wire.read(); // recibe el byte bajo como los 8 bits mas bajos
Serial.println(reading); //imprime la lectura
}
delay(250); // esperar un poco para poder leer la salida :)
}
/*
// El codigo siguiente camabia la direccion de un Devantech Ultrasonic Range Finder (SRF10 o SRF08)
// Uso: Cambio de dirección (0x70, 0xE6);
void changeAddress(byte oldAddress, byte newAddress)
{
Wire.beginTransmission(oldAddress);
Wire.write(byte(0x00));
Wire.write(byte(0xA0));
Wire.endTransmission();
Wire.beginTransmission(oldAddress);
Wire.write(byte(0x00));
Wire.write(byte(0xAA));
Wire.endTransmission();
Wire.beginTransmission(oldAddress);
Wire.write(byte(0x00));
Wire.write(byte(0xA5));
Wire.endTransmission();
Wire.beginTransmission(oldAddress);
Wire.write(byte(0x00));
Wire.write(newAddress);
Wire.endTransmission();
}
*/
No hay comentarios:
Publicar un comentario